元茂興 EMAC 600 運動控制
二、EMAC 600系列的組成
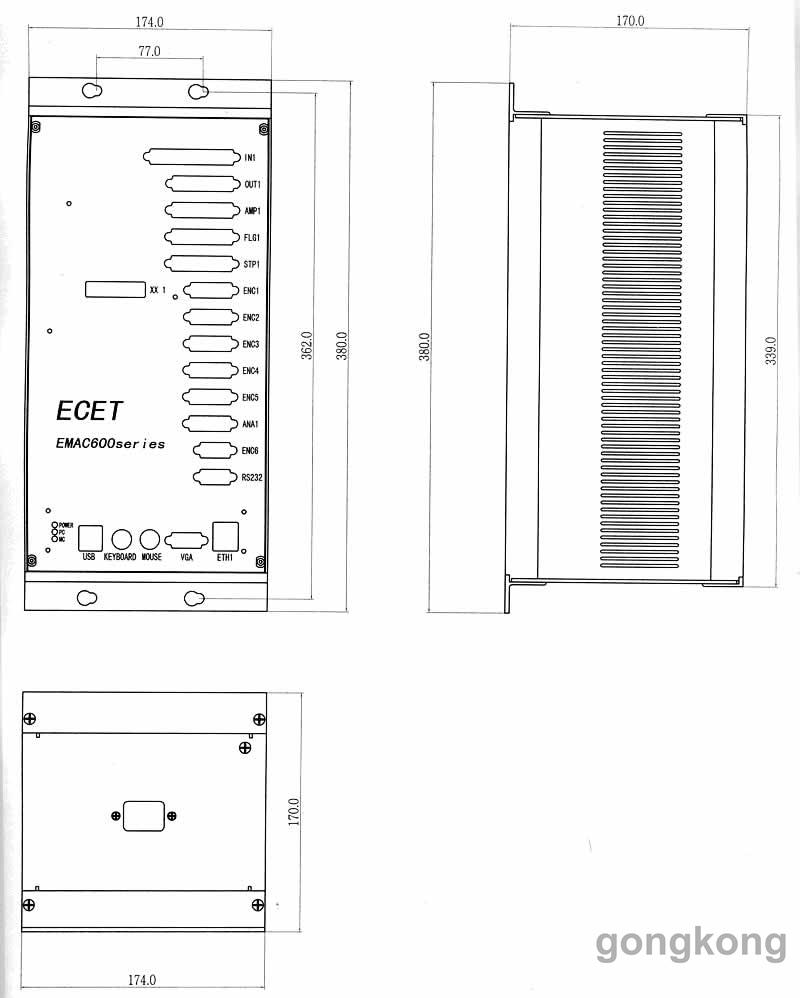
EMAC由計算機、運動控制器、I/O、A/D及接口板、電源、外殼、風扇組成。
計算機配置為533MHz的CPU,128MB SDRAM,1GB電子盤(可選40GB硬盤)、可運行Windows CE、XP、2000、Linix操作系統。
運動控制器配置,PMAC 2A-PC/104,40MHz DSP CPU。
三、EMAC 600系列的功能
(一)EMAC硬件
1、可控制1-6軸步進或伺服,可輸出脈沖和方向或±10V模擬量;
2、接收標準編碼器輸入,10MHz采樣頻率;
3、每軸配有四個標志信號輸入(限位、回零、報警等),兩個標志信號輸入(使能等);
4、32點光隔離源電流12-30VDC輸入,16點輸出12-30VDC輸出,I/O可擴展到1024點輸出,1024點輸入;
5、3路12位A/D采集(可選);
6、支持VGA顯示,RS232/RS485/RS422,Ethenet網口,USB,鍵盤及鼠標;
7、支持現場工業總線CAN;
8、高精度時鐘+/-100ppm;
9、PID陷波/前饋伺服算法;
10、開放的伺服算法口。
(二)軟件
1、運動軌跡規劃
〈1〉 支持S曲線加減速的直線插補;
〈2〉 支持S曲線加減速的圓弧插補;
〈3〉 快速運動;
〈4〉 三次樣條插補模式SPLine;
〈5〉 三次隱式樣條插補模式Hermite-spline(PVT);
〈6〉 自動硬件捕捉/觸發功能;
〈7〉 交互式手動運動;
〈8〉 前瞻功能Lookahead(可選);
2、伺服
〈1〉 獨立的數字PID反饋濾波;
〈2〉 速度前饋,加速度前饋,摩擦力前饋;
〈3〉 2路陷波濾波器;
〈4〉 PID參數可隨時任意改變;
〈5〉 可編程的極限輸入、輸出;
〈6〉 可選擇的多極點伺服算法。
3、換相
〈1〉 交流伺服電機的正弦換相;
〈2〉 交流感應電機的矢量控制;
〈3〉 數字電流環。
4、補償
〈1〉 位置補償列表;
〈2〉 力矩補償列表;
〈3〉 反向間隙補償;
〈4〉 刀具半徑補償。
5、安全
〈1〉 硬件和軟件行程極限;
〈2〉 放大器使能/報警交換信號;
〈3〉 跟隨誤差警告極限;
〈4〉 整合電流極限;
〈5〉 編碼器計數損失報警;
〈6〉 看門狗報警;
〈7〉 程序和通信核驗。
6、計算
〈1〉 實時多任務系統;
〈2〉 48位浮點數編程;
〈3〉 三角函數和超越函數;
〈4〉 自動匹配不同的變量類型。
7、可以使用的反饋形式
〈1〉 數字積分編碼器;
〈2〉 正弦編碼器;
〈3〉 旋轉變壓器;
〈4〉 電位計;
〈5〉 LVDTs,RVDTs;
〈6〉 并行數字編碼器;
〈7〉 MLDTs;
〈8〉 串行編碼器(例如:ssi)。
8、笛卡兒坐標系或主從運動
〈1〉 用戶自定義的笛卡兒坐標系;
〈2〉 可分離運動程序的坐標系;
〈3〉 支持多個電機的坐標系;
〈4〉 軸空間轉化(例如:坐標系位置、旋轉、鏡像);
〈5〉 電子齒輪;
〈6〉 電子凸輪。
9、運動程序
〈1〉 高級程序語言;
〈2〉 自動按順序執行運動;
〈3〉 使用用戶工程單位編程;
〈4〉 運動的值可以是公式,也可以是常量;
〈5〉 自動匹配坐標系里的各軸;
〈6〉 支持G代碼和代碼擴展。
10、PLC程序
〈1〉 與運動程序異步;
〈2〉 可通過PLC,控制硬件I/O;
〈3〉 安全和狀態監視;
〈4〉 伺服比例調整;
〈5〉 數據報告功能;
〈6〉 可使用控制器的全部寄存器。
四、EMAC的硬件接口

