如何選用工業(yè)機(jī)器人(二)
- 關(guān)鍵詞:motec直角坐標(biāo)機(jī)器人
- 作者:北京阿沃德自動(dòng)化設(shè)備有限責(zé)任公司
- 摘要:本文主要介紹直角坐標(biāo)機(jī)器人的手爪方式,結(jié)構(gòu)構(gòu)成,以及在工業(yè)上的應(yīng)用。
前言:現(xiàn)今工業(yè)機(jī)器人主要分兩大類(lèi)——直角坐標(biāo)機(jī)器人和關(guān)節(jié)機(jī)器人,這兩類(lèi)機(jī)器人在諸多工業(yè)領(lǐng)域得以廣泛應(yīng)用。直角坐標(biāo)機(jī)器人的應(yīng)用或者說(shuō)直角坐標(biāo)機(jī)器人本體的應(yīng)用更多解決是物體(或手抓)在三維空間移動(dòng)的問(wèn)題。
一般情況下,機(jī)器人和負(fù)載之間存在兩種工作工藝關(guān)系,(1)機(jī)器人通過(guò)機(jī)器人手抓完成工作工藝需求;(2)機(jī)器人通過(guò)手抓移動(dòng)負(fù)載配合第三方設(shè)備進(jìn)行工作工藝要求的完成。在這兩種主要的機(jī)器人工作過(guò)程中,機(jī)器人手抓起到了非常關(guān)鍵的作用。
甚至,在很多時(shí)候,一個(gè)機(jī)器人項(xiàng)目能否成功,主要看機(jī)器人手抓設(shè)計(jì)的成不成功。機(jī)器人本體更多是解決移動(dòng)中負(fù)載和精度問(wèn)題。但機(jī)器人手抓除了負(fù)載和精度問(wèn)題,還要求和具體工藝程序相關(guān)聯(lián)。MOTEC(中國(guó))的機(jī)器人工程師們多年從事工業(yè)機(jī)器人研發(fā)和制造,本文將以圖文并茂的形式展現(xiàn)出MOTEC-ROBOT 機(jī)器人團(tuán)隊(duì)的一些案例。
機(jī)器人手抓系統(tǒng)
機(jī)器人手抓系統(tǒng),這樣表述其實(shí)更合適,因?yàn)樵诤芏鄼C(jī)器人項(xiàng)目中,機(jī)器人手抓的功能不亞于人手,并且需要步進(jìn)或伺服系統(tǒng)的獨(dú)立控制;也有的需要?dú)鈩?dòng)控制,還有的需要有較強(qiáng)的特殊工作要求,如高溫,防腐等;有的機(jī)器人手抓本身就是加工工具,如激光頭,亞弧焊焊槍或者干脆就是加工刀具;也有的就是膠閥,像北京意美德公司生產(chǎn)的點(diǎn)膠機(jī)器人就是個(gè)明顯的例子。
大多數(shù)應(yīng)用中機(jī)器人的手爪系統(tǒng)就相當(dāng)于人的手。但在復(fù)雜的應(yīng)用中,機(jī)器人的手爪系統(tǒng)就相當(dāng)于幾個(gè)人的手同時(shí)抓取物體。更復(fù)雜時(shí)相當(dāng)于幾個(gè)人用手,另外幾個(gè)人用工具才能完成抓取工作。根據(jù)要完成的具體抓取任務(wù)和設(shè)計(jì)者的經(jīng)驗(yàn),可以選擇不同的手爪結(jié)構(gòu)。
下面我們就搬運(yùn)機(jī)器人和抓取機(jī)器人的手抓設(shè)計(jì)展示一些案例:
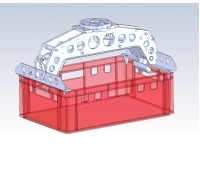
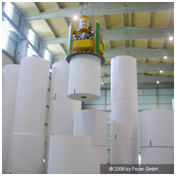
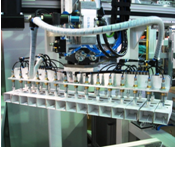
圖一 圖二 圖三


圖一中 展示的是抓取圓柱形空心碳纖維缸體。要求不能劃傷物體表面。
所以本方案既要考慮承載力,又要考慮不能劃傷物體表面,因此,用氣動(dòng)吸盤(pán)家機(jī)械手抓的設(shè)計(jì)方案。
圖二和圖三中展示的是柱狀機(jī)械手抓取大負(fù)載的搬運(yùn)過(guò)程。
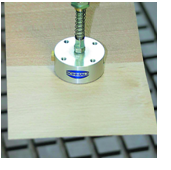
圖四 圖五 圖六

圖七 圖八 圖九