運(yùn)動(dòng)控制頻道
































-
 施耐德電氣發(fā)布Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)
施耐德電氣發(fā)布Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)施耐德電氣近日發(fā)布全新一代機(jī)器運(yùn)動(dòng)控制“黃金四件套”整體解決方案的第三款產(chǎn)品:Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)。
 2025-08-06
2025-08-06標(biāo)簽: 施耐德電氣 運(yùn)動(dòng)控制
-
-eddab40804a14e5880ff5695eb3cc62a_w.jpg) 凱福科技YK-L6020精密電動(dòng)微調(diào)臺
凱福科技YK-L6020精密電動(dòng)微調(diào)臺凱福科技YK-L6020精密電動(dòng)微調(diào)臺
2025-08-05標(biāo)簽: 微調(diào)臺 電動(dòng)微調(diào)臺 凱福科技
-
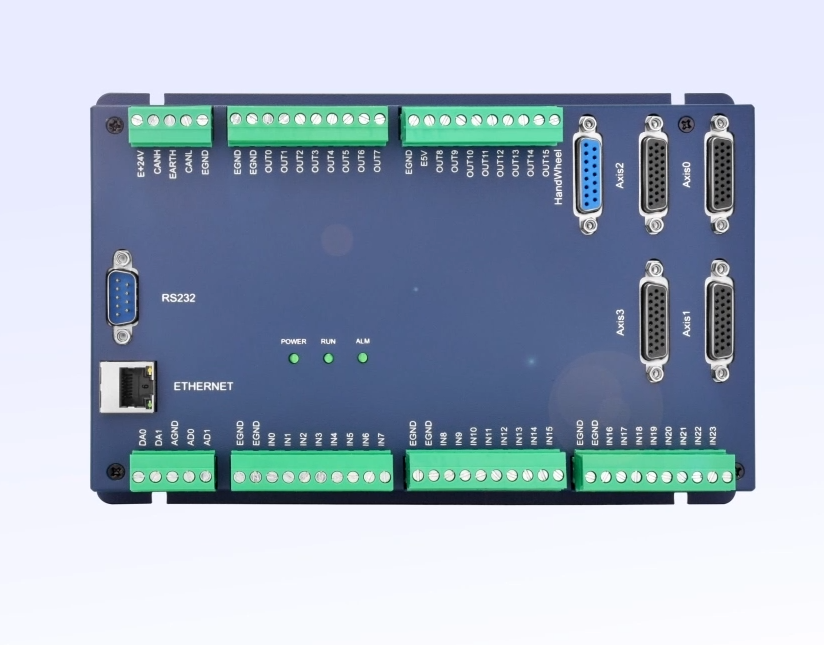
埃斯頓MC403-X運(yùn)動(dòng)控制器用戶手冊
本手冊提供了MC403-X運(yùn)動(dòng)協(xié)調(diào)器的選擇,布線,連接,設(shè)置,操作和功能所需的信息。
2025-08-01標(biāo)簽: 埃斯頓 MC403-X 運(yùn)動(dòng)控制器
-
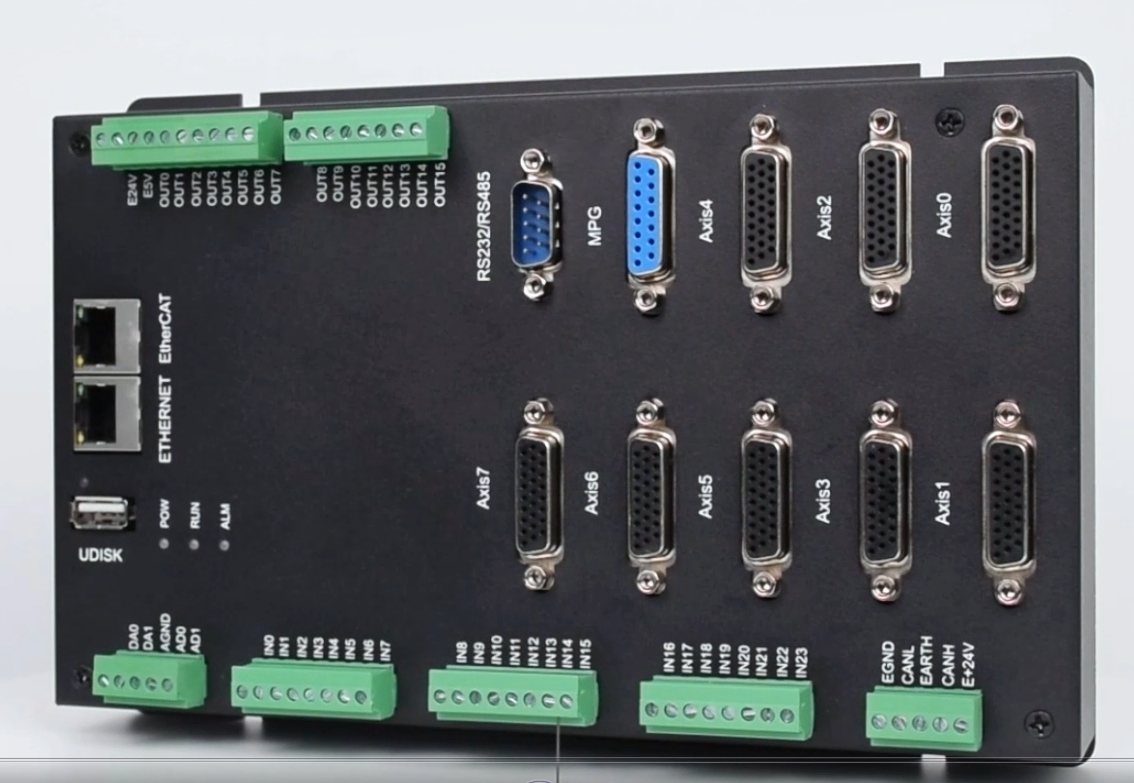
埃斯頓MC404-Z運(yùn)動(dòng)控制器用戶手冊
本手冊提供了MC404-Z運(yùn)動(dòng)協(xié)調(diào)器的選擇,布線,連接,設(shè)置,操作和功能所需的信息
2025-08-01標(biāo)簽: 埃斯頓 MC404-Z 運(yùn)動(dòng)控制器
-
埃斯頓MC405運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的安裝接線及快速設(shè)置等內(nèi)容。
2025-08-01標(biāo)簽: 埃斯頓 MC405 運(yùn)動(dòng)控制器
-
埃斯頓MC508運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的規(guī)格參數(shù)、安裝接線及參數(shù)配置等。
2025-08-01標(biāo)簽: 埃斯頓 MC508 運(yùn)動(dòng)控制器
-
埃斯頓MC6N-ECAT運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的規(guī)格參數(shù)、安裝接線及網(wǎng)絡(luò)設(shè)置等。
2025-08-01標(biāo)簽: 埃斯頓 MC6N-ECAT 運(yùn)動(dòng)控制器
-
埃斯頓EHM/EHD系列伺服驅(qū)動(dòng)器樣本
資料介紹了產(chǎn)品的特性、規(guī)格參數(shù)及外型尺寸等。
2025-08-01標(biāo)簽: EHM EHD 伺服驅(qū)動(dòng)器
-
埃斯頓ProNet Plus系列交流伺服用戶手冊
資料對產(chǎn)品的規(guī)格型號、安裝配線及通訊設(shè)置進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 ProNet Plus 伺服驅(qū)動(dòng)器
-
埃斯頓ED3E 系列脈沖型交流伺服驅(qū)動(dòng)器產(chǎn)品手
本手冊對 Summa ED3E 系列脈沖型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3E”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3E
-
埃斯頓ED3E 系列總線型交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對 Summa ED3E 系列總線型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3E”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3E
-
埃斯頓ED3S系列交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對 Summa ED3S 系列交流伺服驅(qū)動(dòng)器(簡稱“ED3S”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3S
-
埃斯頓ED5E 系列總線型交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對 Summa ED5E 系列總線型交流伺服驅(qū)動(dòng)器(以下簡稱“ED5E”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 ED5E 伺服驅(qū)動(dòng)器
-
埃斯頓ED3L 系列脈沖型交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對 Summa ED3L 系列脈沖型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3L”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3L
-
埃斯頓ED3L系列 PN總線型交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對SummaED3L系列總線型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3L”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3L
-
信捷MP3系列步進(jìn)電機(jī)CAD圖紙
主要包括信捷MP3系列開環(huán)步進(jìn)電機(jī)CAD圖紙、MP3系列閉環(huán)步進(jìn)電機(jī)CAD圖紙、MP3系列高壓步進(jìn)電機(jī)CAD圖紙等內(nèi)容,可供安裝參考。
2025-08-01標(biāo)簽: MP3 信捷步進(jìn)電機(jī) 圖紙
-
新時(shí)達(dá)EM-C系列伺服驅(qū)動(dòng)器用戶手冊
資料介紹了產(chǎn)品的規(guī)格參數(shù)、外形尺寸、安裝接線及網(wǎng)絡(luò)配置等。
2025-07-31標(biāo)簽: 新時(shí)達(dá) EM-C 伺服驅(qū)動(dòng)器
-
-896f7c2b4e914da4921114b00d1c6ae6_w.jpg) 凱福科技旋轉(zhuǎn)型精密微調(diào)臺YK-R40
凱福科技旋轉(zhuǎn)型精密微調(diào)臺YK-R40凱福科技旋轉(zhuǎn)型精密微調(diào)臺YK-R40
2025-07-31標(biāo)簽: 微調(diào)臺 電動(dòng)微調(diào)臺 凱福科技
-
 臺達(dá)重磅發(fā)布11款工業(yè)自動(dòng)化新品,以“N+種可能”驅(qū)動(dòng)制造業(yè)數(shù)智躍遷
臺達(dá)重磅發(fā)布11款工業(yè)自動(dòng)化新品,以“N+種可能”驅(qū)動(dòng)制造業(yè)數(shù)智躍遷7月30日,以“從1到N ,不止迭代”為主題的2025臺達(dá)工業(yè)自動(dòng)化新品發(fā)布會給出了答案——11款凝聚底層創(chuàng)新與場景智慧的新品矩陣正式亮相,為電子制造、半導(dǎo)體、鋰電、光伏等行業(yè)提供從單機(jī)智能到系統(tǒng)智能的全鏈路升級方案,開啟工業(yè)自動(dòng)化的“N 進(jìn)化”時(shí)代。
2025-07-31標(biāo)簽: 臺達(dá) 工業(yè)自動(dòng)化新品
- +加載更多
-
施耐德電氣發(fā)布Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)
施耐德電氣近日發(fā)布全新一代機(jī)器運(yùn)動(dòng)控制“黃金四件套”整體解決方案的第三款產(chǎn)品:Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)。
2025-08-06標(biāo)簽: 施耐德電氣 運(yùn)動(dòng)控制
-
凱福科技YK-L6020精密電動(dòng)微調(diào)臺
凱福科技YK-L6020精密電動(dòng)微調(diào)臺
2025-08-05標(biāo)簽: 微調(diào)臺 電動(dòng)微調(diào)臺 凱福科技
-
埃斯頓EHM/EHD系列伺服驅(qū)動(dòng)器樣本
資料介紹了產(chǎn)品的特性、規(guī)格參數(shù)及外型尺寸等。
2025-08-01標(biāo)簽: EHM EHD 伺服驅(qū)動(dòng)器
-
埃斯頓ProNet Plus系列交流伺服用戶手冊
資料對產(chǎn)品的規(guī)格型號、安裝配線及通訊設(shè)置進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 ProNet Plus 伺服驅(qū)動(dòng)器
-
埃斯頓ED3E 系列脈沖型交流伺服驅(qū)動(dòng)器產(chǎn)品手
本手冊對 Summa ED3E 系列脈沖型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3E”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3E
-
埃斯頓ED3E 系列總線型交流伺服驅(qū)動(dòng)器產(chǎn)品手冊
本手冊對 Summa ED3E 系列總線型交流伺服驅(qū)動(dòng)器(以下簡稱“ED3E”)的選型、設(shè)計(jì)、試運(yùn)行、調(diào)整、運(yùn)行、維護(hù)所需的信息進(jìn)行了說明。
2025-08-01標(biāo)簽: 埃斯頓 伺服驅(qū)動(dòng)器 ED3E
- +更多資訊
-
施耐德電氣發(fā)布Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)
施耐德電氣近日發(fā)布全新一代機(jī)器運(yùn)動(dòng)控制“黃金四件套”整體解決方案的第三款產(chǎn)品:Lexium 18ME系列伺服驅(qū)動(dòng)器和BEH18系列伺服電機(jī)。
2025-08-06標(biāo)簽: 施耐德電氣 運(yùn)動(dòng)控制
-
臺達(dá)重磅發(fā)布11款工業(yè)自動(dòng)化新品,以“N+種可能”驅(qū)動(dòng)制造業(yè)數(shù)智躍遷
7月30日,以“從1到N ,不止迭代”為主題的2025臺達(dá)工業(yè)自動(dòng)化新品發(fā)布會給出了答案——11款凝聚底層創(chuàng)新與場景智慧的新品矩陣正式亮相,為電子制造、半導(dǎo)體、鋰電、光伏等行業(yè)提供從單機(jī)智能到系統(tǒng)智能的全鏈路升級方案,開啟工業(yè)自動(dòng)化的“N 進(jìn)化”時(shí)代。
2025-07-31標(biāo)簽: 臺達(dá) 工業(yè)自動(dòng)化新品
-
 小莫星品|安全之選!Platinum Harmonica高功率密度伺服驅(qū)動(dòng)器
小莫星品|安全之選!Platinum Harmonica高功率密度伺服驅(qū)動(dòng)器小莫星品|安全之選!Platinum Harmonica高功率密度伺服驅(qū)動(dòng)器
2025-07-16標(biāo)簽: 埃莫 運(yùn)動(dòng)控制 伺服驅(qū)動(dòng)器
-
 高速 | 高精 | 高性能——松下升級款運(yùn)動(dòng)控制器GM5系列全新上市!
高速 | 高精 | 高性能——松下升級款運(yùn)動(dòng)控制器GM5系列全新上市!松下GM5系列運(yùn)動(dòng)控制器是面向高速/高精/復(fù)雜運(yùn)動(dòng)控制應(yīng)用場景的高端型可編程運(yùn)動(dòng)控制器,為大型工廠自動(dòng)化和復(fù)雜產(chǎn)線提供專業(yè)的控制解決方案。
2025-07-11標(biāo)簽: 運(yùn)動(dòng)控制器 可編程運(yùn)動(dòng)控制 工廠自動(dòng)化
-
 新品推介|固高GSFD mini系列低壓伺服驅(qū)動(dòng)器
新品推介|固高GSFD mini系列低壓伺服驅(qū)動(dòng)器固高科技,作為行業(yè)內(nèi)的知名品牌,擁有深厚的技術(shù)底蘊(yùn)和強(qiáng)大的研發(fā)實(shí)力。多年來,始終致力于伺服驅(qū)動(dòng)技術(shù)的研發(fā)與創(chuàng)新,在工業(yè)自動(dòng)化領(lǐng)域積累了豐富的經(jīng)驗(yàn)。研發(fā)團(tuán)隊(duì)匯聚了眾多行業(yè)精英,憑借著對技術(shù)的執(zhí)著追求和對市場需求的敏銳洞察力,不斷推陳出新,為固高科技的產(chǎn)品注入了強(qiáng)大的技術(shù)內(nèi)核。新推出的GSFD mini系列低壓伺服驅(qū)動(dòng)器是..
2025-07-04標(biāo)簽: 新品 固高 低壓伺服驅(qū)動(dòng)器
-
 奧托尼克斯新品上市 | 模塊型多通道功率控制器SPRS系列
奧托尼克斯新品上市 | 模塊型多通道功率控制器SPRS系列SPRS系列模塊化多通道功率控制器結(jié)合控制模塊和電源模塊,精確控制加熱設(shè)備的溫度。通過多達(dá)36個(gè)單元的電源分配控制功能,可以實(shí)現(xiàn)高效的功率控制。各種控制方式和報(bào)警功能也一應(yīng)俱全。
2025-06-18標(biāo)簽: 奧托尼克斯 模塊型多通道功率...
- +更多資訊
-
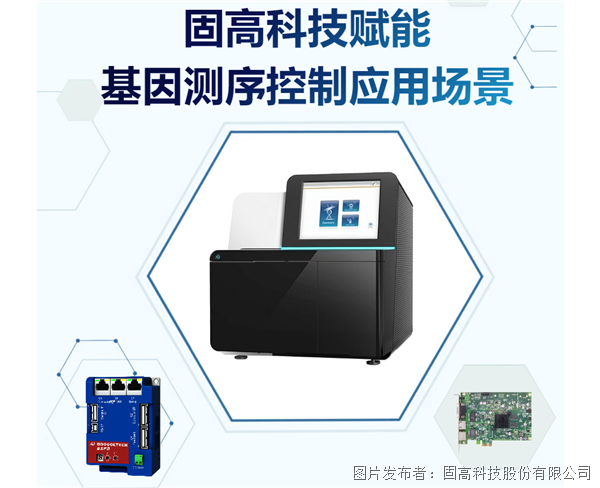 固高科技賦能基因測序控制應(yīng)用場景
固高科技賦能基因測序控制應(yīng)用場景基因測序儀作為現(xiàn)代生物醫(yī)學(xué)研究的核心工具,通過精準(zhǔn)測定DNA分子序列,為人類深入探索生物體遺傳信息打開了關(guān)鍵窗口,其在醫(yī)學(xué)診斷、農(nóng)業(yè)育種及基礎(chǔ)生物學(xué)研究等領(lǐng)域的作用舉足輕重。基因測序儀通過對生物體基因組進(jìn)行測序分析,科學(xué)家能夠系統(tǒng)解析基因的結(jié)構(gòu)與功能,揭示基因之間的相互作用機(jī)制,探索基因調(diào)控生物發(fā)育進(jìn)程和生理活..
2025-07-30標(biāo)簽: 固高科技 基因測序控制 應(yīng)用場景
-
 ABB邀你探索直流應(yīng)用的世界
ABB邀你探索直流應(yīng)用的世界2025年7月23日-25日,ABB攜全系列直流產(chǎn)品亮相由中國建筑節(jié)能協(xié)會主辦的“2025國際零碳城市鄉(xiāng)村與零碳建筑大會暨技術(shù)設(shè)備博覽會”(簡稱“國際零碳大會”)。本次大會位于北京首鋼國際會展中心,ABB展位號 A19-1。
-
 茵夢達(dá)電機(jī)以碳足跡認(rèn)證為筆,繪就綠色發(fā)展新藍(lán)圖
茵夢達(dá)電機(jī)以碳足跡認(rèn)證為筆,繪就綠色發(fā)展新藍(lán)圖在全球低碳轉(zhuǎn)型的浪潮下,產(chǎn)品碳足跡已從“可選項(xiàng)”逐漸成為企業(yè)參與國際競爭的“必答題”。從歐盟碳邊境調(diào)節(jié)機(jī)制到《歐盟新電池法》,從國內(nèi)“雙碳”目標(biāo)到綠色工廠建設(shè),政策與市場的雙重驅(qū)動(dòng)下,核算并公開產(chǎn)品碳足跡成為企業(yè)可持續(xù)發(fā)展的關(guān)鍵一步。作為深耕電機(jī)領(lǐng)域的領(lǐng)軍企業(yè),茵夢達(dá)電機(jī)(中國)有限公司率先行動(dòng),旗下多款產(chǎn)品已通過權(quán)..
-
 成功案例 | 奇石樂測力臺為科研、臨床步態(tài)分析提供生物力學(xué)關(guān)鍵數(shù)據(jù)
成功案例 | 奇石樂測力臺為科研、臨床步態(tài)分析提供生物力學(xué)關(guān)鍵數(shù)據(jù)在馬德里自治大學(xué) ONCE 物理治療學(xué)院的步態(tài)實(shí)驗(yàn)室中,奇石樂測力臺發(fā)揮著關(guān)鍵作用:15 年來,它與其他儀器協(xié)同工作,持續(xù)為個(gè)體步態(tài)分析提供人體測量數(shù)據(jù)。這些數(shù)據(jù)不僅用于臨床治療,還為西班牙各地醫(yī)院與大學(xué)開展的神經(jīng)學(xué)研究提供支持。
-
 報(bào)名開啟科創(chuàng)之夏!2025年固高創(chuàng)工場青少年科創(chuàng)營學(xué)員招募
報(bào)名開啟科創(chuàng)之夏!2025年固高創(chuàng)工場青少年科創(chuàng)營學(xué)員招募你是否曾好奇,生活中的小現(xiàn)象背后藏著哪些科學(xué)秘密?歡迎加入固高創(chuàng)工場青少年科創(chuàng)營,變身“生活科學(xué)偵探”。
2025-07-22標(biāo)簽: 科創(chuàng) 固高 創(chuàng)工場
-
 固高伺創(chuàng)亮相電子裝備產(chǎn)業(yè)柔性智造創(chuàng)新技術(shù)發(fā)展論壇
固高伺創(chuàng)亮相電子裝備產(chǎn)業(yè)柔性智造創(chuàng)新技術(shù)發(fā)展論壇2025固高伺創(chuàng)亮相 電子裝備產(chǎn)業(yè)柔性智造 創(chuàng)新技術(shù)發(fā)展論壇
- +更多資訊
-
埃斯頓MC403-X運(yùn)動(dòng)控制器用戶手冊
本手冊提供了MC403-X運(yùn)動(dòng)協(xié)調(diào)器的選擇,布線,連接,設(shè)置,操作和功能所需的信息。
2025-08-01標(biāo)簽: 埃斯頓 MC403-X 運(yùn)動(dòng)控制器
-
埃斯頓MC404-Z運(yùn)動(dòng)控制器用戶手冊
本手冊提供了MC404-Z運(yùn)動(dòng)協(xié)調(diào)器的選擇,布線,連接,設(shè)置,操作和功能所需的信息
2025-08-01標(biāo)簽: 埃斯頓 MC404-Z 運(yùn)動(dòng)控制器
-
埃斯頓MC405運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的安裝接線及快速設(shè)置等內(nèi)容。
2025-08-01標(biāo)簽: 埃斯頓 MC405 運(yùn)動(dòng)控制器
-
埃斯頓MC508運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的規(guī)格參數(shù)、安裝接線及參數(shù)配置等。
2025-08-01標(biāo)簽: 埃斯頓 MC508 運(yùn)動(dòng)控制器
-
埃斯頓MC6N-ECAT運(yùn)動(dòng)控制器快速入門指南
資料介紹了產(chǎn)品的規(guī)格參數(shù)、安裝接線及網(wǎng)絡(luò)設(shè)置等。
2025-08-01標(biāo)簽: 埃斯頓 MC6N-ECAT 運(yùn)動(dòng)控制器
-
埃斯頓EHM/EHD系列伺服驅(qū)動(dòng)器樣本
資料介紹了產(chǎn)品的特性、規(guī)格參數(shù)及外型尺寸等。
2025-08-01標(biāo)簽: EHM EHD 伺服驅(qū)動(dòng)器
- +更多資訊
-
微案例 | Elmo如何助力生命科學(xué)企業(yè)打造核心競爭力?
不同類型的企業(yè)面對這個(gè)問題,解決方案不盡相同,但對于醫(yī)療化驗(yàn)室、醫(yī)藥公司和生物科技公司而言,自動(dòng)化實(shí)驗(yàn)流程是必然選擇。
2025-07-16標(biāo)簽: 埃莫運(yùn)動(dòng) 伺服驅(qū)動(dòng)器
-
高速 | 高精 | 高性能——松下升級款運(yùn)動(dòng)控制器GM5系列全新上市!
松下GM5系列運(yùn)動(dòng)控制器是面向高速/高精/復(fù)雜運(yùn)動(dòng)控制應(yīng)用場景的高端型可編程運(yùn)動(dòng)控制器。基于 CODESYS V3 平臺,配備 4核高性能CPU,支持 IEC61131-3 編程語言和 PLCopen標(biāo)準(zhǔn)。采用 2ch EtherCAT 總線架構(gòu),最大支持128軸控制,為大型工廠自動(dòng)化和復(fù)雜產(chǎn)線提供專業(yè)的控制解決方案。
2025-07-11標(biāo)簽: 松下 運(yùn)動(dòng)控制器 GM5
-
案例 | Elmo如何助力生命科學(xué)企業(yè)打造核心競爭力?
不同類型的企業(yè)面對這個(gè)問題,解決方案不盡相同,但對于醫(yī)療化驗(yàn)室、醫(yī)藥公司和生物科技公司而言,自動(dòng)化實(shí)驗(yàn)流程是必然選擇。
2025-07-03標(biāo)簽: 埃莫運(yùn)動(dòng) 伺服驅(qū)動(dòng)器
-
【固高GSHD系列高性能伺服驅(qū)動(dòng)器系列教程】—用戶模式配置(上)、用戶模式配置(下)
?GSHD系列高性能伺服驅(qū)動(dòng)器的硬件與軟件采用創(chuàng)新設(shè)計(jì),可對所有主流電機(jī)進(jìn)行高性能控制。其外形輕巧,調(diào)試簡單,并具有廣泛的通用性
2025-06-26標(biāo)簽: 固高 伺服驅(qū)動(dòng)器 用戶模式配置
-
Elmo助力康復(fù)機(jī)器人Atalante突破臨床最后一公里
日前,全球領(lǐng)先的機(jī)械外骨骼康復(fù)機(jī)器人公司W(wǎng)andercraft宣布正式啟動(dòng)新一代個(gè)人外骨骼機(jī)器人Atalante臨床試驗(yàn),為脊髓損傷患者提供獨(dú)立行走可能。
2025-05-28標(biāo)簽: 埃莫運(yùn)動(dòng) 伺服驅(qū)動(dòng)器 康復(fù)機(jī)器人
-
智能算法賦能——一站式高速立式包裝機(jī)解決方案
為應(yīng)對立式包裝機(jī)常見挑戰(zhàn),松下推出一站式高速立式包裝機(jī)方案,旨在提升設(shè)備的穩(wěn)定性、兼容性以及操作便捷性,提升生產(chǎn)效率和保證產(chǎn)品質(zhì)量。
2025-04-29標(biāo)簽: 松下 包裝機(jī) 運(yùn)動(dòng)控制器
- +更多資訊
-
【正運(yùn)動(dòng)技術(shù)】如何使用控制器實(shí)現(xiàn)龍門同步?
控制器ADDAX龍門實(shí)現(xiàn) 解決方案: 方法一:最方便的方法,推薦直接使用驅(qū)動(dòng)器的龍門同步算法; 方法二:使用絕對值伺服(或者搭配光柵尺,精度更高),先設(shè)定一個(gè)Y1Y2的正常偏差值,每次回原點(diǎn)之后,根據(jù)編碼器原始值encoder比較,做一個(gè)龍門矯正; 方法三:控制器可以使用ADDAX指令疊加方法;兩個(gè)驅(qū)動(dòng)的響應(yīng)和..
2025-08-06 -
【正運(yùn)動(dòng)技術(shù)】激光振鏡運(yùn)動(dòng)控制器在流水線激光打標(biāo)上的應(yīng)用
市場應(yīng)用背景 激光打標(biāo)憑借其永久性、高精度和無接觸的優(yōu)勢,已成為包裝印刷、廣告標(biāo)識、線纜電子及精密零件等領(lǐng)域應(yīng)用最廣泛的標(biāo)記加工技術(shù)。 隨著工業(yè)4.0的深入推進(jìn),傳統(tǒng)激光打標(biāo)面臨新挑戰(zhàn),視覺定位激光打標(biāo)方案應(yīng)運(yùn)而生。該方案融合先進(jìn)的機(jī)器視覺與激光打標(biāo)技術(shù),在自動(dòng)化生產(chǎn)線上實(shí)現(xiàn)了高精度定位與高效打標(biāo)。這不僅是一次..
2025-08-05 -
【正運(yùn)動(dòng)技術(shù)】連續(xù)插補(bǔ)運(yùn)動(dòng)是什么?有什么優(yōu)勢?
首先,如果不開啟連續(xù)插補(bǔ)(MERGE),當(dāng)上一條插補(bǔ)運(yùn)動(dòng)完成后,執(zhí)行下一條插補(bǔ)時(shí),會先進(jìn)行減速停止,再重新加速執(zhí)行插補(bǔ)運(yùn)動(dòng),實(shí)際應(yīng)用時(shí)這種情況會導(dǎo)致加工效率低下。 所以當(dāng)我們開啟連續(xù)插補(bǔ)(MERGE)功能,可以讓連續(xù)的插補(bǔ)運(yùn)動(dòng)之間不減速,可大幅度提升加工的效率。 開啟連續(xù)插補(bǔ)功能,指令為:MERGE=ON;開啟后相同主軸的插補(bǔ)..
2025-08-05 -
【正運(yùn)動(dòng)技術(shù)】插補(bǔ)運(yùn)動(dòng)大課堂,開課啦!
插補(bǔ)是機(jī)床數(shù)控系統(tǒng)依照一定方法確定刀具運(yùn)動(dòng)軌跡的過程,插補(bǔ)是一個(gè)實(shí)時(shí)進(jìn)行的數(shù)據(jù)密化的過程,不論是何種插補(bǔ)算法,運(yùn)算原理基本相同,其作用都是根據(jù)給定的信息進(jìn)行數(shù)字計(jì)算,不斷計(jì)算出參與運(yùn)動(dòng)的各坐標(biāo)軸的進(jìn)給指令,然后分別驅(qū)動(dòng)各自相應(yīng)的執(zhí)行部件產(chǎn)生協(xié)調(diào)運(yùn)動(dòng),以使被控機(jī)械部件按理想的路線與速度移動(dòng)。 插補(bǔ)最常見的..
2025-08-01 -
激光焊接設(shè)備案例說明
整體概述 設(shè)備用于雙工位激光焊接產(chǎn)品,物料經(jīng)進(jìn)料位由機(jī)械軸自動(dòng)輸送至加工位,觸發(fā)激光完成精密焊接后,將成品經(jīng)進(jìn)料軸送出,完成作業(yè),雙工位交替運(yùn)作,該設(shè)備控制軟件完全由GS平臺開發(fā)實(shí)現(xiàn),顯著提升焊接效率,用于金屬零部件批量化焊接場景。 設(shè)備圖片: 設(shè)備硬件: 板卡:固高GTS8軸脈沖卡,帶端子板 開始搭建前工作 1..
2025-07-31 -
軟包電池引導(dǎo)焊接案例說明
整體概述 設(shè)備用于通過視覺定位智能算法實(shí)現(xiàn)高精度極耳焊接。相機(jī)精準(zhǔn)捕捉鋰電池兩端角位置,結(jié)合焊接點(diǎn)偏移參數(shù),實(shí)現(xiàn)極耳尋址,自動(dòng)計(jì)算21條焊接點(diǎn)空間坐標(biāo)并實(shí)時(shí)傳輸至PLC,適配多規(guī)格鋰電池焊接需求。 現(xiàn)場設(shè)備調(diào)試圖片: 設(shè)備硬件: PLC:西門子S71500 光源:圖靈微視(華周智能)DKZ4-24V-4-AC 相機(jī):海康MV-CU120 ..
2025-07-31 - 更多資訊